基于反演的图像编辑Inversion_based_editing in flow_matching models
前言:基于扩散/流生成模型中的图像编辑:
- test-time optimization:规模性的微调训练,如FLUX-Fill 模型、FLUX-redux万物迁移
- optimization-free:
- Inversion-reconstruction:如 RF-Inversion,RF-Edit,并不能算“编辑”,更像“图生图”,适合风格迁移,无法背景保持,耗时 step*2
- Inversion-free:如 Flow Edit,不再借助反演的中间的高斯噪声分布,但并没有节省时间消耗,依然 耗时 step*2
- Inversion-based-cache:借助Inversion,并在采样时注入Inversion得到的中间表示【如:序列token,V,k&V,等】,耗时 step*2——> 实现结构保留的图像编辑!!!
- RF-Edit:注意力共享:替换 V【单流自注意力中的V_ref】
- KV-Edit:注意力共享:替换 K & V
- Personalize Anything:图像token替换,位置编码ids的实验探究
什么是Inversion?
扩散的Inversion如何实现?
FLow_based的Inversion如何实现?
阅读博文:
flux代码:
sigmas = np.linspace(1.0, 1 / T_steps, T_steps) 从1~0均匀取值,但是取不到0,最后一位==(1/T_steps)!!!!
在进入模型主体之前,img和txt都需要通过Linear层,将维度分别调整为:
- img: [bs, 4096, 64] ==> [bs, 4096, 3072]
- txt: [bs, 512, 4096] ==> [bs, 512, 3072]
- 其中 3072: 注意力头数为 24,每头维度 128,总的内部特征维度达到 3072=(24×128)
VAE:16通道,8倍压缩比 = pipe.vae_scale_factor=8, patchify图块化22的两倍压缩比, FLUX*总压缩比16; FLUX.1 由于把 2×2 个像素在通道上拼接到了一起,其去噪网络的输入通道数是 64
加噪:Z_t= (1-t)*Z_0 + t*N_t, N_t~正态分布(0,1) scale_noise函数中实现;
去噪:latents = self.scheduler.step( noise_pred, t, latents, return_dict=False )[0]
FluxTransformer2DModel.FluxAttnProcessor2_0个数:57 == single_transformer_blocks:38 + transformer_blocks:19
1 | |
1. Inversion in flow_matching models:
1.1 RF-Inversion: Semantic Image Inversion and Editing using Rectified Stochastic Differential Equations——谷歌【收入diffusers】
理论性强,没看懂;
被收入diffusers: 在:
examples/community/pipeline_flux_rf_inversion.py中的FlowMatchEulerDiscreteSDEScheduler注意:diffusers中
FluxPipeline默认的flux采样器是FlowMatchEulerDiscreteSchedulerRF-Inversion需要自己拉仓库导入上述
FlowMatchEulerDiscreteSDESchedulerinvert参数固定:gamma=0.5,inversion直接利用ref的latent_image_ids
代码:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34# pipeline.invert
# Eq 8 dY_t = [u_t(Y_t) + γ(u_t(Y_t|y_1) - u_t(Y_t))]dt
Y_t = image_latents
y_1 = torch.randn_like(Y_t)
N = len(sigmas)
# forward ODE loop
with self.progress_bar(total=N - 1) as progress_bar:
for i in range(N - 1):
t_i = torch.tensor(i / (N), dtype=Y_t.dtype, device=device)
timestep = torch.tensor(t_i, dtype=Y_t.dtype, device=device).repeat(batch_size)
# print(text_ids.shape, latent_image_ids.shape)
# get the unconditional vector field
u_t_i = self.transformer(
hidden_states=Y_t,
timestep=timestep,
guidance=guidance,
pooled_projections=pooled_prompt_embeds,
encoder_hidden_states=prompt_embeds,
txt_ids=text_ids,
img_ids=latent_image_ids,
joint_attention_kwargs=self.joint_attention_kwargs,
return_dict=False,
)[0]
# get the conditional vector field
u_t_i_cond = (y_1 - Y_t) / (1 - t_i)
# controlled vector field
# Eq 8 dY_t = [u_t(Y_t) + γ(u_t(Y_t|y_1) - u_t(Y_t))]dt
u_hat_t_i = u_t_i + gamma * (u_t_i_cond - u_t_i)
Y_t = Y_t + u_hat_t_i * (sigmas[i] - sigmas[i + 1])
progress_bar.update()1
2
3
4
5
6
7
8
9
10
11
12
13
14# 推理pipeline.call:
if do_rf_inversion:
v_t = -noise_pred
v_t_cond = (y_0 - latents) / (1 - t_i)
eta_t = eta if start_timestep <= i < stop_timestep else 0.0
if decay_eta:
eta_t = eta_t * (1 - i / num_inference_steps) ** eta_decay_power # Decay eta over the loop
v_hat_t = v_t + eta_t * (v_t_cond - v_t)
# SDE Eq: 17 from https://arxiv.org/pdf/2410.10792
latents = latents + v_hat_t * (sigmas[i] - sigmas[i + 1])
else:
# compute the previous noisy sample x_t -> x_t-1
latents = self.scheduler.step(noise_pred, t, latents, return_dict=False)[0]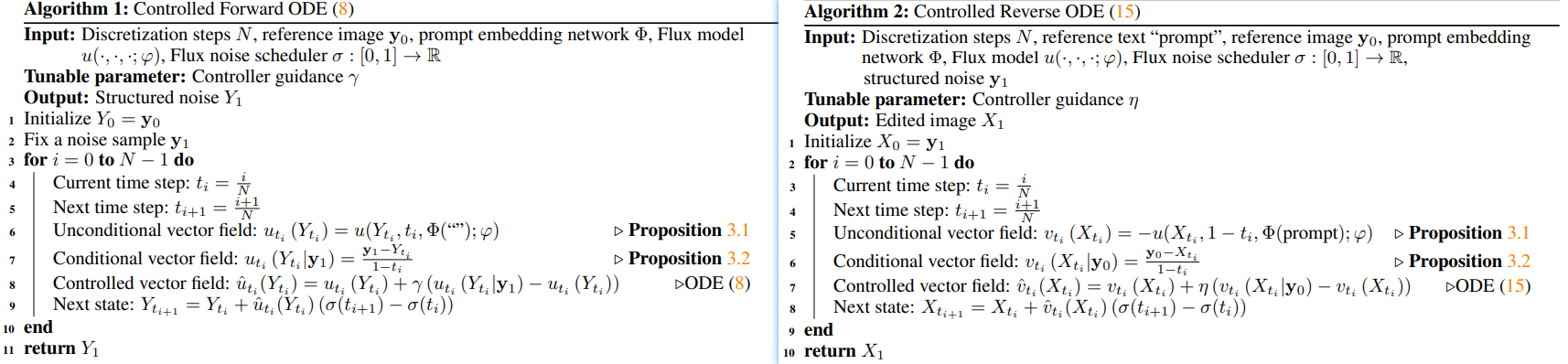
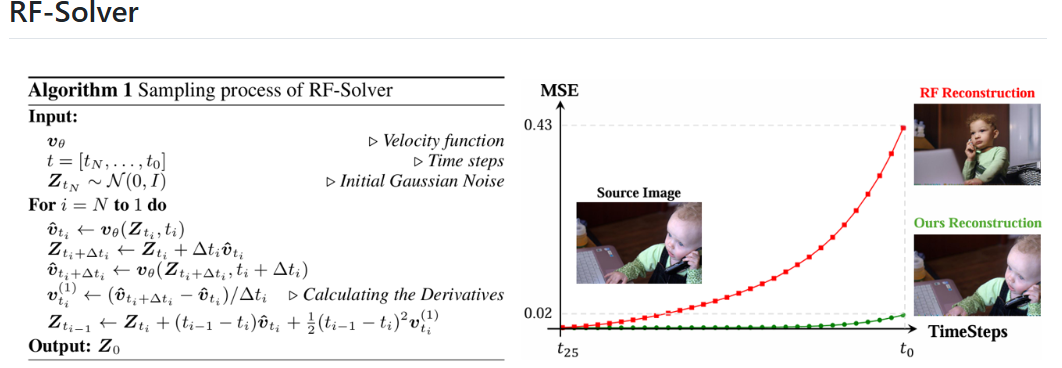
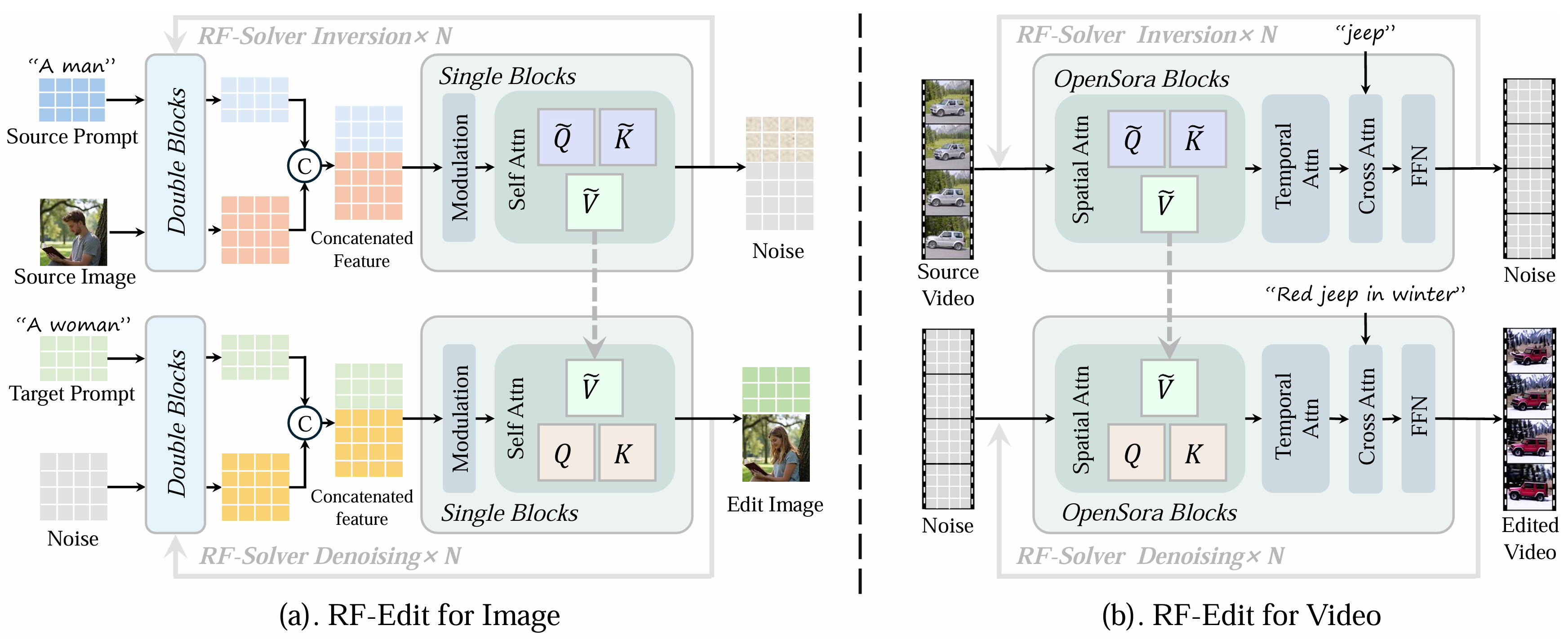
1.2 RF-Edit: Taming Rectified Flow for Inversion and Editing——腾讯
- ODE 泰勒展开 + 一阶导近似
- 为增强细节保留在Edit时利用了注意力共享: Inversion + 替换V【单流自注意力中的V_ref】
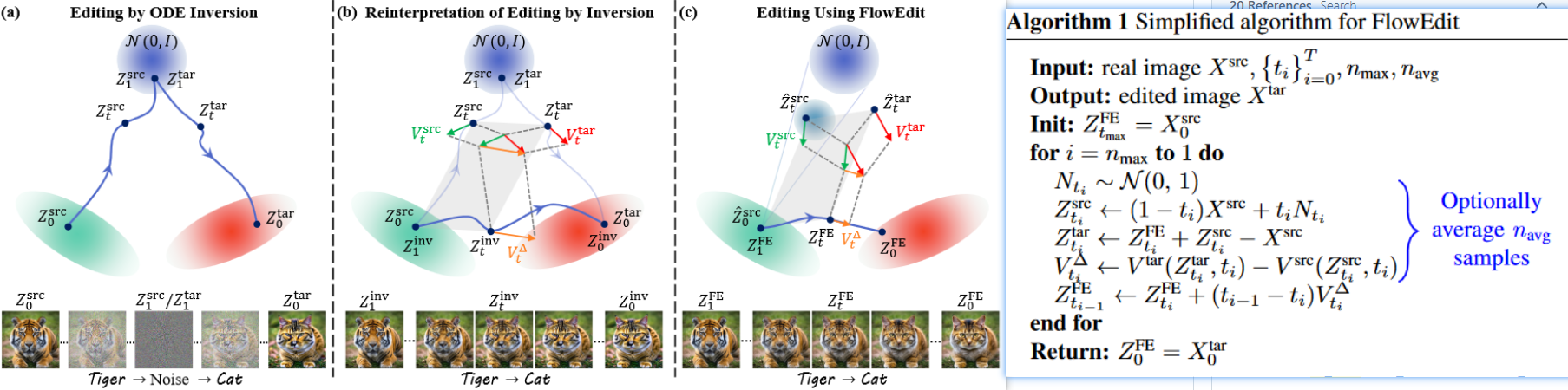
1.3 FlowEdit: Inversion-Free Text-Based Editing Using Pre-Trained Flow Models 2024.12
理论创新:
- 没去实现Inversion找中间高斯噪声的步骤,而是直接从源分布到目标分布【近似noise_free】,并在实际操作时根据n_avg取平均;
- Noise_free的路径:分布转换的路径消耗更小,会更好;
耗时依旧:但由于实现过程中的每一step都需要使用FLUX模型推理两次(v_tar、v_src),实现起来依然需要 2*steps!,与inversion方法相比并没有实质性的耗时优化;
代码:image_ids复制了src的image_ids
1 | |
- inversion vs FlowEdit 路径对比以及FlowEdit伪代码:
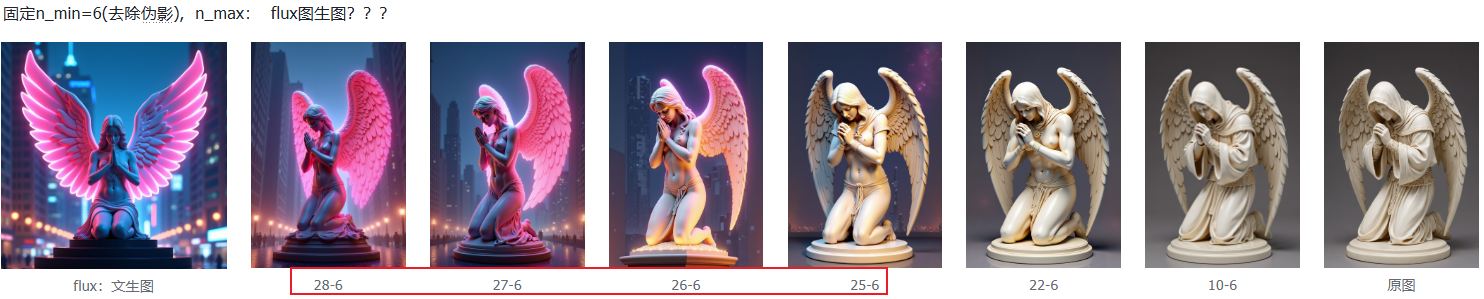
测试:
n_min:伪影解决:timestep = 28, n_max = 24, n_min =0, n_avg=1: n_min设置为较小的数,能够在后期去噪阶段进行正常flow去噪,把伪影去掉;
timestep 是去噪的全部步数,去噪时倒着数:从28,27,一直到1;
原论文代码中设置:
- timestep–n_max:不进行处理
- n_max–n_min:flow_edit处理
- n_min–1:正常flow去噪处理

n_max:n_max的设置见SDEdit论文,调整了编辑的强度,n_max越大,编辑强度/程度越大
2. Inversion_based_editing:
2.1 RF-Edit: inversion+ 替换单流自注意力中的 V (上文讲过)
- ODE 泰勒展开 + 一阶导近似
- 为增强细节保留在Edit时利用了注意力共享: Inversion + 替换V【单流自注意力中的V_ref】
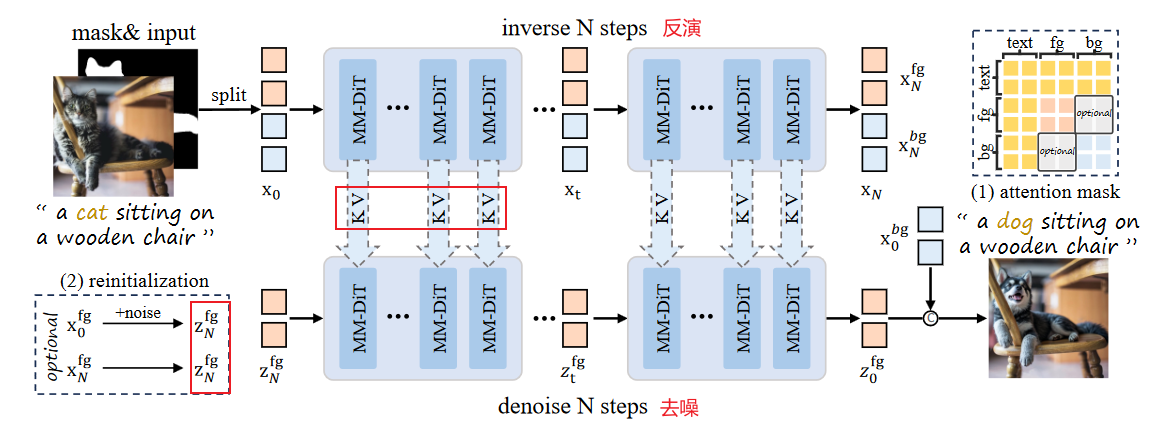
2.2 KV Edit: inversion + 拼接 K & V——背景保留能力 2025.3
论文:
如何实现inversion?
1
类似于RF-Inversion,没有使用condition control反演步骤:包括前景和背景的分离反演,耗时*2???:
- 前景反演:获得前景对应的高斯分布噪声分布,以作为去噪的初始表示
- 背景反演:获得反演过程中的cached-K_bg / cached_V_bg,以指导去噪的背景保留
去噪步骤:
- 初始表示:除了removal任务使用reint(加入随机噪声)外,其他均使用反演步骤得到的前景反演噪声XN_fg
- 双流交叉注意力中:拼接来自背景的K/V?具体如何实现
针对object removal:
- re-init :
after inversion, we replace ztN with fused noise z′tN = noise·tN +ztN ·(1−tN )disrupt the original content information. incorporate an attention mask during the inversion process
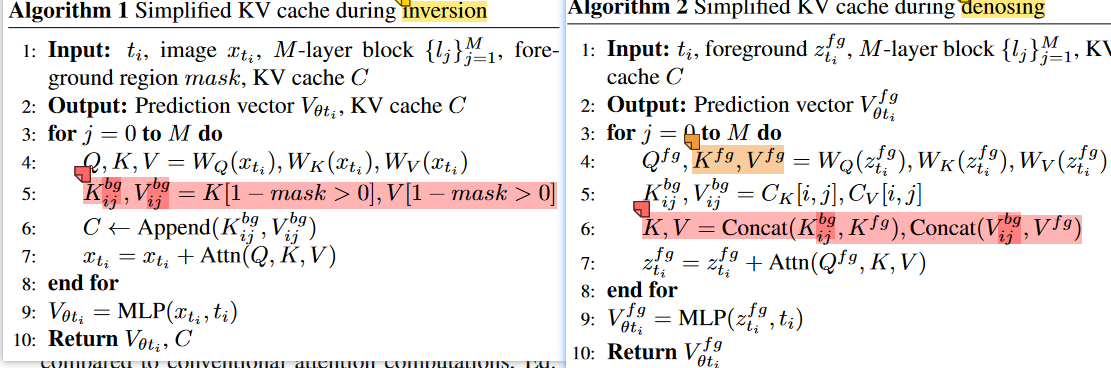
有些不明白的描述——看代码:
Q_fg represents queries containing only foreground tokens
(Kfg, Kbg) and (Vfg, Vbg) denote the concatenation of background and foreground keys and values in their proper order (equivalent to the complete image’s keys and values),
crop fg操作???performing cropping at both input and output of the attention layer,
提出改进:是否可以更近一步K V不使用contencate,而是替换?:personalize anything是对图像token_ref替换,同时对位置编码也做了操作
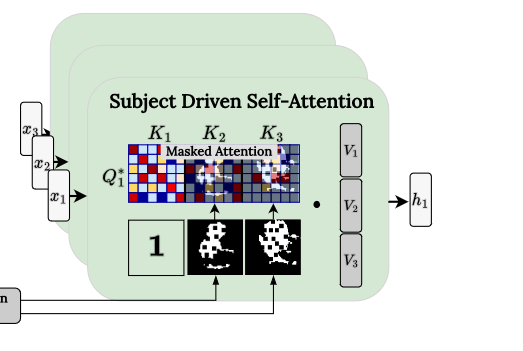
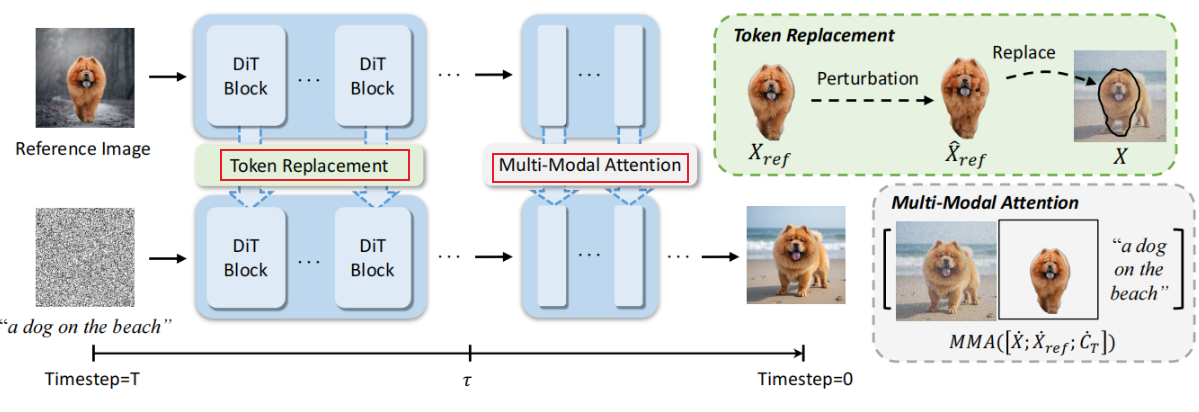
2.3 Personalize Anything: inversion + 图像序列替换——inpaint、outpaint、个性化保持 2025.3
- 如何实现inversion:RF-Inversion【代码】,RF-Edit【论文】
- 反演步骤:
- 获得cached_tokens【无位置ids信息】:只获得语义token,不要位置
- 去噪步骤:
- 无位置ids信息的 cached_tokens 替换replace position_encoded denoising tokens:无伪影,对ref关注,利于重建ref
- 替换的具体实现:依赖于mask:X`= X ⊙ (1 − M) + X_ref ⊙ M,其中M可以经过任意平移;
- timestep-adaptive token replacement:
- 在去噪的前期阶段执行替换
- 在去噪的后期阶段:拼接 【denoising_tokens,零ids置为的ref_tokens,text_tokens】执行MMA多模态注意力:增强语义能力
- Patch Perturbation for Variation:减少过拟合
- 3*3window 打乱ids
- Mask的增强:膨胀 腐蚀
- 消融实验:
- position_encoded denoising tokens 与 position_encoded cached_tokens 拼接:两者的ids都保持:产生ref伪影——DiT对ids位置很敏感
- position_encoded denoising tokens 与 全部ids置为(0,0)或者平移后的(i+w, j) 的 cached_tokens 拼接:对ref不产生关注
- 多任务能力:
- Mask的灵活移动性带来了:布局引导
- 多主体生成
- 图像编辑:disable perturbations and set τ to 10% total steps:inpaint、outpaint
测试:
缺:ref_token的替换并不能十分严谨的重建/保持主体特征,而且inpaint内外不连贯,需要依赖于tau阈值参数的调整,

代码:
RFInversionParallelFluxPipeline:
1
2
3
4
5
6
7
8
9
10
11
12
13# pipeline_flux_rf_inversion:与RF-Inversion相同
inverted_latents, image_latents, latent_image_ids = pipe.invert(
source_prompt="", # 使用空描述
image=init_image,
height=height,
width=width,
num_inversion_steps=timestep,
gamma=1.0)
# pipe.forward():执行ref_tokens替换的图像编辑生成:# 新增参数inverted_latents、start_timestep、stop_timestep: 去噪过程中timestep从1-0逐步减小!
latents = inverted_latents
new_latents, _ = self.prepare_latents(1,..., generator,latents=None,)
latents = torch.cat((latents, new_latents), dim=0) # [0]:inverted_noise_latent, [1]:rand_noise_latentset_flux_transformer_attn_processor:定义attn processor,每次不同的任务都需要重新定义
1
2
3
4
5# img_dims: 图像latent序列长度,VAE8倍压缩比 = pipe.vae_scale_factor=8, patchify图块化2*2的两倍压缩比, 总压缩比16
set_flux_transformer_attn_processor(
pipe.transformer,
set_attn_proc_func=lambda name, dh, nh, ap: PersonalizeAnythingAttnProcessor( name=name, tau=tau/100, mask=mask, shift_mask=shift_mask, device=device, img_dims=img_dims, concept_process=False),)
# 通过每次重新定义attn processor来实现mask、tau阈值、shift_mask、concept_process等参数传递:shift_mask、maskPersonalizeAnythingAttnProcessor、MultiPersonalizeAnythingAttnProcessor 对比原始 FluxAttnProcessor2_0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24# FluxAttnProcessor2_0:在q k v 获得后,attention计算之前,添加旋转的位置编码:
if image_rotary_emb is not None:
from .embeddings import apply_rotary_emb
query = apply_rotary_emb(query, image_rotary_emb)
key = apply_rotary_emb(key, image_rotary_emb)
# PersonalizeAnythingAttnProcessor.forward():多了timestep参数:由self._joint_attention_kwargs["timestep"] =进行传递
# concept_feature_ r_hidden_states????
if encoder_hidden_states is not None:
concept_feature_ = hidden_states[0, self.mask, :] # self.mask = mask.view(img_dims).bool().to(device)
else:
concept_feature_ = hidden_states[0, 512:, :][self.mask, :] # flux使用512个text_tokens
if r_k or r_q or r_v:
r_hidden_states = hidden_states
if encoder_hidden_states is not None:
r_hidden_states[1, self.shift_mask, :] = concept_feature_
else:
text_hidden_states = hidden_states[1, :512, :]
image_hidden_states = hidden_states[1, 512:, :]
image_hidden_states[self.shift_mask, :] = concept_feature_
r_hidden_states[1] = torch.cat([text_hidden_states, image_hidden_states], dim=0)
insight: 视频大模型具有对物理规律的理解,光照光影位置关系等,可以利用视频大模型的先验进行图片领域上的任务,如图像编辑、多视图生成
style-align
Training-Free Consistent Text-to-Image Generation